Python Perfomance Options#
Python is a programming language that is chosen often for the easy and forgiving syntax. Unfortunately, as we will see, the same features that make Python this easy are also the features that make it very slow compared to many other languages.
We will discuss a few options on how to speed up calculations.
Before we begin, I want to point out what we will not be discussing here. We will not be discussing File I/O – i.e. how to make the program read or write data from/to disk faster. There are very few things you can do once the hardware is in place to speed up that process, and for the few cases where there might be a difference to be made, other tutorials will talk about that.
We will also not be discussing parallelisation and dask, which can be used to speed up the computation, but is discussed widely elsewhere. This post will be discussing on how to overcome the inherent performance issues with Python itself.
Example Challenge: Interpolation#
To compare different methods, we will have different methods to perform the same task: A linear interpolation of a large array.
That is, we will have three arrays:
X0- The x-components of the initial datasetY0- The corresponding y-component, so it must have the same length asX0.X1- The new x-components that we want to interpolate to.
And we want to get the y-components Y1, that correspond to the values of X1 and follow the same procedure.
For ease of use, we will look at a sine wave, interpolated to a smaller and shifted grid.
Verification#
We will verify that we get the same values by calling the numpy function allclose() on the arrays to check whether they’re all the same.
Note that it’s usually not a good idea to compare floating point variables for absolute identity, as changing the order of operations might cause different rounding errors that lead to every so small differences in the actual values.
We will use the assert keyword, which does nothing at all if the allclose returns True, but will leave a big AssertionError if allclose returns False.
Timing#
We will be using the Python timeit package to evaluate how quickly the computation runs.
This method runs the code several times, and averages the results.
result = %timeit -o some_complex_function() ## This will be timed
We collect these results in a dictionary for comparison at the end.
Native Python#
To get a baseline for the performance, we will start with doing it all in Python natively.
import matplotlib.pyplot as plt
import seaborn as sns
from math import sin, pi
from typing import List
from nptyping import NDArray, Shape, Float64 ## Will be used for type hinting later
sns.set_theme()
timings = {}
N0 = 100_000
X0 = [(4.0 * pi / N0) * i for i in range(N0)]
Y0 = [sin(x) for x in X0]
N1 = 40_000
X1 = [(3.0 * pi / N1) * i + 1e-4 for i in range(N1)]
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(X0, Y0)
plt.show()
## Note that I'm using type hints here.
## They will have no effect on the code's performance
## or behaviour, but make it more understandable.
def single_interp(x0: float, y0: float, x1: float, y1: float, x: float) -> float:
y = (y0 * (x1 - x) + y1 * (x - x0)) / (x1 - x0)
return y
def interp(X1: List[float], X0: List[float], Y0: List[float]) -> List[float]:
idx0 = 0
Y1 = [0.0] * len(X1)
for idx1, x1 in enumerate(X1):
while X0[idx0] < x1:
idx0 += 1
if X0[idx0] == x1:
Y1[idx1] = Y0[idx0]
else:
Y1[idx1] = single_interp(X0[idx0 - 1], Y0[idx0 - 1], X0[idx0], Y0[idx0], X1[idx1])
return Y1
timings['python'] = %timeit -o interp(X1, X0, Y0)
Y1_python = interp(X1, X0, Y0)
6.79 ms ± 1.93 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
As you can see, on my computer this has taken about 7 ms on average. This might not seem like much, but if we have a multi-dimensional array, this will take some time.
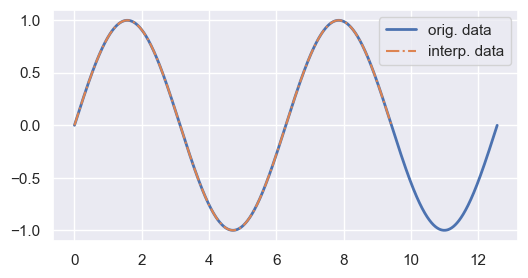
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(X0, Y0, linewidth=2, label='orig. data')
ax.plot(X1, Y1_python, '-.', label='interp. data')
ax.legend()
plt.show()
Using numpy#
Lists aren’t the most performant way to store arrays of constant type inside Python. For those items, numpy was created.
Numpy is the backbone of most of the often-used computation routines, including scipy, dask, and xarray.
import numpy as np
X0 = np.array(X0, dtype=np.float64)
Y0 = np.array(Y0, dtype=np.float64)
X1 = np.array(X1, dtype=np.float64)
As it happens, numpy has an interpolation routine already implemented.
Using it is pretty straightforward:
timings['numpy'] = %timeit -o np.interp(X1, X0, Y0)
Y1_numpy = np.interp(X1, X0, Y0)
assert np.allclose(Y1_python, Y1_numpy)
721 µs ± 11.4 µs per loop (mean ± std. dev. of 7 runs, 1,000 loops each)
We can see that the numpy calculation took a bit more than half a Millisecond, an order of magnitude faster than our own list implementation.
If such an option is availalbe for your use case, this is where you should stop. Numpy is generally coded efficiently and you will spend a lot of time coding to get a little bit more performance out of it.
But for the reminder of the post, we will assume that our task is too unusual to find such an implementation, or we will be running it hundreds of thousands of times, and we will need to create our own. We will still continue to use numpy as the array, though.
Scipy#
If numpy doesn’t deliver the method we are seeking, we should have a closer look at scipy.
This package comes with such a wide range of scientifically important methods that we will almost always find a method that we can use.
Looking at the ScPy Documentation, we can find an interpolate section that contains the method interp1d, which does what we want.
from scipy.interpolate import interp1d
interpolator = interp1d(X0, Y0, kind='linear')
timings['scipy'] = %timeit -o interpolator(X1)
Y1_scipy = interpolator(X1)
assert np.allclose(Y1_numpy, Y1_scipy)
747 µs ± 491 ns per loop (mean ± std. dev. of 7 runs, 1,000 loops each)
Note that the developers behind scipy have decided to deprecate the interp1d method in favour of the numpy.interp method described above.
This section is only intended to show that scipy offers a wide range of optimised calculations on numeric arrays.
Numba#
Numba is a module that increases the performance of python code considerably.
It is used by adding the Numba Just In Time @jit decorator before the function declaration.
This makes numba compile the code before execution, making it much, much faster.
You can read more about Numba here.
from numba import jit
@jit
def single_interp_numba(x0: np.float64, y0: np.float64, x1: np.float64, y1: np.float64, x: np.float64) -> np.float64:
y = (y0 * (x1 - x) + y1 * (x - x0)) / (x1 - x0)
return y
@jit
def interp_numba(
X1: NDArray[Shape["N1"], Float64],
X0: NDArray[Shape["N0"], Float64],
Y0: NDArray[Shape["N0"], Float64]
) -> NDArray[Shape["N1"], Float64]:
idx0 = 0
Y1 = np.empty_like(X1)
for idx1, x1 in enumerate(X1):
while X0[idx0] < x1:
idx0 += 1
if X0[idx0] == x1:
Y1[idx1] = Y0[idx0]
else:
Y1[idx1] = single_interp_numba(X0[idx0 - 1], Y0[idx0 - 1], X0[idx0], Y0[idx0], X1[idx1])
return Y1
timings['numba'] = %timeit -o interp_numba(X1, X0, Y0)
Y1_numba = interp_numba(X1, X0, Y0)
assert np.allclose(Y1_numpy, Y1_numba)
97.3 µs ± 2.73 µs per loop (mean ± std. dev. of 7 runs, 1 loop each)
In this particular case, the computation was again 7 times faster than even the numpy.interp call.
To be honest, this is a bit surprising, and I suspect that this is due to the numpy routine making some edge case checks that our code here simply ignores.
Pre-Compiled Code#
There are interfaces to write code in compiled programming languages, and call them from within python.
As an example, we will look at a fortran subroutine.
Fortran#
To run fortran from within Jupyter, we can install the fortran-magic package with either pip or conda:
pip install fortran-magic
Then we load the extension by executing the magic:
%load_ext fortranmagic
After this, we can mark a cell with %%fortran to ensure that the contents of that cell get compiled and made available as a function.
Let’s check it out.
%%fortran
subroutine interp_fortran(X1, X0, Y0, Y1, n0, n1)
implicit none
real*8, intent(in) :: X1(n1), X0(n0), Y0(n0)
real*8, intent(out) :: Y1(n1)
integer, intent(in) :: n0, n1
integer :: idx0, idx1
idx0 = 1
Y1 = 0.0_8
do idx1 = 1, n1
do while (X0(idx0) < X1(idx1) .and. idx0 < n0)
idx0 = idx0 + 1
end do
if (X0(idx0) == X1(idx1)) then
Y1(idx1) = Y0(idx0)
else
Y1(idx1) = single_interp(X0(idx0 - 1), Y0(idx0 - 1), X0(idx0), Y0(idx0), X1(idx1))
end if
end do
contains
function single_interp(xs0, ys0, xs1, ys1, xs) result(ys)
implicit none
real*8, intent(in) :: xs0, ys0, xs1, ys1, xs
real*8 :: ys
ys = (ys0 * (xs1 - xs) + ys1 * (xs - xs0)) / (xs1 - xs0)
end function single_interp
end subroutine interp_fortran
The %%fortran magic makes it very convenient to have everything inside a single notebook.
But you can also save the fortan code in a separate file, for example lib_interp.f90,
then run the shell command:
python -m numpy.f2py -c lib_interp.f90 -m lib_interp
This creates a new module called lib_interp, which can be imported:
from lib_interp import interp_fortran
Also note that the code uses the archaic and actually non-standard real*8 declaration for double precision floating point numbers.
f2py gets confused when using the correct c_double (from iso_c_binding) or real64 (from iso_fortran_env) kind declarators.
Ask me how I know.
timings['fortran'] = %timeit -o interp_fortran(X1, X0, Y0)
Y1_fortran = interp_fortran(X1, X0, Y0)
assert np.allclose(Y1_numba, Y1_fortran)
78.4 µs ± 174 ns per loop (mean ± std. dev. of 7 runs, 10,000 loops each)
In this case, I chose Fortran as the language of the compiled code, but there are ways to program the functions in other ways, for example in C and Rust. Just chose the (compiled) language that you are most compfortable with.
Mojo#
You might have heard about Mojo, a new language that aims to be a superset of python, but fast. To achieve the promised speed improvements, mojo has to step away from weakly typed, interpreted, reflective python syntax, thereby foregoing many of the characteristics that make Python such an inviting language in the first place.
At this early point in time, mojo is volatile and far from production ready. To get the promised speed improvements, one needs to rewrite practically everything. It is probably worth keeping it on the radar, but I would advise against spending too much time on it at this point in time.
I have not been able to test and compare the performance for this example.
Conclusion#
We have looked at different ways how to improve the computation performance of our Python code.
Numpy is already the backbone of our calculations, and comes with a lot of operations on these arrays pre-build. It’s reasonably efficient and often enough for what we want to do.
Scipy is a package with a quite large amount of scientifically relevant functions and routines. There’s almost always a fast and performant method fitting for the task.
Numba can be used to translate python code into machine code and execute that compiled code. This can lead to really large performance increases.
Compiling own code means writing code in another, compiled, language like Fortran, C, or Rust. This can give us a lot of control over the execution, and will likely lead to very good performance.
Mojo is a project that we should keep on our radar, but at the moment it’s not ripe for use. The idea is to bring together the ease of use of python with the performance of a compiled language. There are smart people with lofty goals working on it, but whether that’s even possible is not yet known.
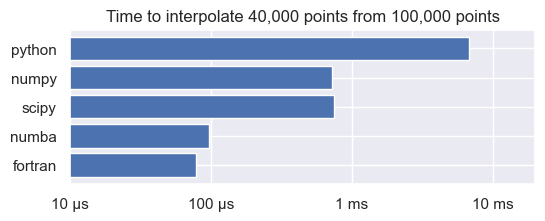
Let’s have a look at a comparison of the results of the interpolation:
fig, ax = plt.subplots(figsize=(6, 2))
methods = list(reversed(('python', 'numpy', 'scipy', 'numba', 'fortran')))
values = [timings[method].average for method in methods]
ax.barh(methods, values)
ax.set_xscale('log')
ax.set_xlim(1e-5,0.02)
ax.set_xticks([1e-5, 1e-4, 1e-3, 1e-2])
ax.set_xticklabels(['10 µs', '100 µs', '1 ms', '10 ms'])
ax.set_title(f"Time to interpolate {N1:,d} points from {N0:,d} points")
plt.show()